| Стабилизационные свойства гироскопа |
| Как построить маховичный двигатель | |||
| 05.04.2014 08:45 | |||
|
Рассмотрим двухстепенный гироскоп, используемый в стабилизированных платформах (рис. 108).
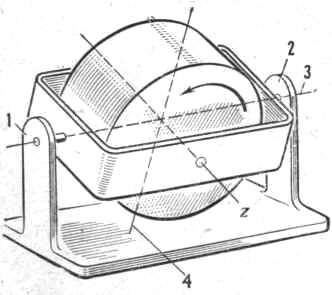
Рис. 108. Схема гироскопа для стабилизирования платформ:
1—место установки датчика момента; 2—место установки датчика угла; 3— выходная ось; 4—входная ось
Двухстепенный гироскоп может поворачиваться вокруг выходной оси; относительно входной оси он удерживается в заданном положении системой автоматической коррекции. Двухстепенный гироскоп вместе с платформой обеспечивает стабилизацию относительно одной оси. Применив два или три двухстепенных гироскопа, можно осуществить стабилизацию платформы относительно двух или трех взаимно перпендикулярных осей.
Рассмотрим, как стабилизируется платформа. Стабилизация относительно осей внутренней и наружной рамок осуществляется гироскопами, у которых ось вращения рамки (ось прецессии) перпендикулярна к плоскости платформы (на рис. 109 это левый и правый гироскопы на переднем плане), и сервомоторами внутренней и наружной рамок. Платформа показана в положении, когда ось собственного вращения левого гироскопа параллельна оси внутренней рамки, а правого — оси наружной рамки.
Предположим, что по оси наружной рамки действует возмущающий момент. Согласно закону прецессии он не может повернуть платформу, а вызовет прецессию левого гироскопа относительно платформы; правый гироскоп не прореагирует на этот момент. Прецессируя, гироскоп будет отклоняться от своего нормального положения, вследствие чего его датчик угла начнет выдавать сигнал. Этот сигнал через преобразователь координат (о нем будет сказано ниже) и усилитель подается на сервомотор наружной рамки, который начинает прикладывать к ней момент, противоположный возмущающему моменту и все возрастающий по мере возрастания угла прецессии. Когда момент сервомотора уравновесит возмущающий момент, прецессия прекратится. В таком состоянии система будет оставаться до тех пор, пока действует возмущающий момент. Важно, чтобы указанное равновесие наступало при достаточно малом угле отклонения гироскопа от его нормального положения.
Таким образом, возмущающий момент вызывает лишь прецессию гироскопа и не вызывает движения самой платформы. Однако следует заметить, что в наших рассуждениях мы не учитывали нутацию. В действительности же, при приложении к платформе внешнего момента одновременно с прецессией возникают и нутационные колебания относительно осей подвеса. Амплитуда и частота этих колебаний, определяются кинетическим моментом гироскопа, моментами инерции платформы со всеми ее элементами относительно осей подвеса и динамическими параметрами системы стабилизации. При этом амплитуда колебаний зависит еще и от величины приложенного внешнего момента.
Если указанные параметры выбраны правильно, а в случае необходимости приняты еще и некоторые специальные меры, то нутационные колебания платформы будут практически неощутимы. С исчезновением внешнего воздействия, под действием момента сервомотора гироскоп вернется в нормальное положение, при котором сигнал датчика угла, а следовательно, и момент сервомотора обратятся в ноль. Таким образом, платформа стабилизируется путем компенсации возмущающего момента моментом сервомотора. В течение времени, когда момент сервомотора меньше возмущающего воздействия, избыток последнего компенсируется гироскопическим моментом, развиваемым прецессирующим гироскопом.
Если возмущающий момент будет действовать по оси внутренней рамки, то он вызовет прецессию правого гироскопа, который в этом случае аналогично предыдущему приведет в действие сервомотор внутренней рамки. Значит, при положении платформы, показанном на рис. 109, левый гироскоп должен управлять сервомотором наружной рамки, а правый сервомотором внутренней рамки.
Повернем корпус платформы в азимуте на некоторый угол, не кратный 90°. Теперь оси собственного вращения указанных гироскопов уже не будут параллельны осям внутренней и наружных рамок. Поэтому возмущающий момент, действующий по любой из этих осей, вызовет прецессию сразу обоих гироскопов. И, следовательно, если сохранить прежнюю схему управления, то будут включены оба сервомотора, в то время как должен работать только тот, по оси которого действует возмущающий момент. В этом случае требуется определить, по какой оси действует возмущающий момент, на какой сервомотор подать управляющий сигнал и каким он должен быть по величине и знаку. Если же возмущающие моменты действуют одновременно по обеим осям, то необходимо установить, каким должен быть управляющий сигнал для каждого сервомотора. Автоматическое решение этого вопроса обеспечивается так называемым преобразователем координат, который представляет собой поворотный трансформатор, используемый в качестве фазовращателя.
Прецессию левого и правого гироскопов вызывают только моменты, направленные по их взаимно перпендикулярным осям (см. рис. 108 и 109), связанным с платформой. Поэтому прецеосия гироскопов, а следовательно, и сигналы их датчиков угла характеризуют моменты, действующие на платформу по этим двум связанным с ней осям. Преобразователь координат воспринимает азимутное положение платформы относительно корпуса прибора. Он обеспечивает преобразование указанных моментов к осям внутренней и наружной рамок для любого азимутального положения платформы относительно корпуса прибора. Это достигается путем соответствующего изменения сигналов датчиков угла гироскопов.
На рис. 109 преобразователь координат расположен на внутренней рамке справа от сервомотора. Его статор жестко связал с внутренней рамкой, а ротор получает вращение от платформы 2 через пару шестерен при ее поворотах относительно внутренней рамки.
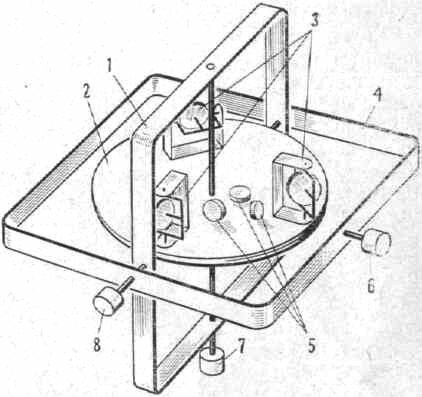
Рис. 109. Схема платформы, стабилизированной относительно Земли:
1—внутренняя рамка; 2—платформа; 3—двухстепенные гироскопы; 4—наружная рамка; 5—акселерометры; 6—сервомотор креновой рамки; 7— сервомотор азимутальной оси; 8—сервомотор тангажной рамки
Стабилизация платформы относительно азимутной оси осуществляется третьим гироскопом и сервомотором платформы, установленным на внутренней рамке (внизу). Входная ось данного гироскопа всегда параллельна азимутальной оси платформы, поэтому он реагирует только на моменты, действующие на платформу относительно ее азимутальной оси.
Рассмотренный способ стабилизации называется силовой гироскопической стабилизацией. Стабилизирующий момент, создаваемый гироскопом, представляет собой гироскопический момент, возникающий при прецессии гироскопа и направленный перпендикулярно к осям прецессии и собственного вращении. Он равен по величине и противоположен по направлению внешнему моменту, действующему на платформу и вызывающему прецессию гироскопа. Гироскопический момент, а следовательно, и стабилизирующее действие на платформу, непосредственно самого гироскопа существует только до тех пор, пока существует прецессия. Когда момент сервомотора становится равным по величине возмущающему моменту, прецессия прекращается. С этого времени стабилизация платформы осуществляется только сервомотором.
Схема одноосной стабилизированной платформы приведена на рис. 110.

Рис. 110. Схема одноосной стабилизированной платформы:
1—гироскоп; 2—датчик угла; 3—сервоусилитель; 4—сервомотор; 5—корпус; 6—платформа; 7—ось платформы; 8—выходная ось гироскопа
Стабилизирующие свойства инерционных аккумуляторов используются в так называемых однорельсовых экипажах. Равновесие этих экипажей поддерживается помещенным в них стабилизирующим гироскопическим устройством. Это свойство гироскопов было применено для стабилизации двухколесного экипажа в 1914 г. П. Шиловским, а еще ранее англичанином Бреннаном для его монорельсового вагона.
Этот вагон (рис. 111) перевозил по территории выставки до 40 человек, причем сохранял равновесие не только на ходу, но и на стоянках.

Рис. 111. Однорельсовый экипаж Бреннана
В настоящее время разработан ряд конструкций двухколесных автомобилей с гироскопической стабилизацией. Двухколесные автомобили имеют ряд преимуществ по сравнению с четырехколесными.
|