| Как отбалансировать маховик? |
| Как построить маховичный двигатель | |||||||||||||||||||||||||||||||||||||||
| 05.04.2014 11:26 | |||||||||||||||||||||||||||||||||||||||
|
Наличие тяжелого быстровращающегося маховика в инерционном аккумуляторе требует проведения тщательной балансировки, так как в случае неуравновешенности маховика могут наступить опасные вибрации. Несмотря на то, что в некоторых конструкциях инерционных аккумуляторов (например, конструкции А. Г. Уфимцева) предусмотрены гибкие опоры, даже здесь неуравновешенность нежелательна, поскольку она приводит к дополнительным потерям энергии и может вызвать резонансные явления.
Рассмотрим равномерное вращение с угловой скоростью со твердого тела вокруг какой-нибудь оси. Центробежная сила инерции массы m этого тела, как известно, равна
Fц= mrω^2 (43)
где г— расстояние от оси вращения до центра массы тела.
Для реальных частот вращения маховиков инерционных аккумуляторов даже сравнительно малая неуравновешенность может вызвать большую центробежную силу. Например, для массы 100 г, расположенной на расстоянии 0,5 м от оси вращения, центробежная сила при 5000 об/мин составляет около 15 кН, 10 000 об/мин — около 60 кН, 20 000 об/мин — около 240 кН. Отсюда видно, как тщательно должны быть отбалансированы маховики инерционных аккумуляторов, вращающиеся с весьма высокой скоростью, для того чтобы не могли возникнуть опасные по величине центробежные силы.
В процессе изготовления маховика вследствие неизбежных технологических погрешностей, неоднородности материала это условие нарушается, и маховик приобретает неуравновешенность.

Неуравновешенность бывает трех видов: статическая, динамическая и комбинированная. В случае статической неуравновешенности все неуравновешенные массы можно заменить одной приведенной массой т, центр которой смещен относительно оси вращения на расстояние q (рис. 93, а). При вращении неуравновешенного маховика центробежная сила приведенной массы, постоянная по абсолютной величине и переменная по направлению, действует на опоры маховика, вызывая их колебания. Статическую неуравновешенность можно обнаружить без сообщения маховику вращательного движения. Она характерна для таких деталей, размер которых вдоль оси вращения мал по сравнению с поперечными размерами, например, дисков и др.
 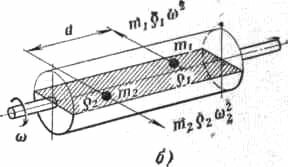
Рис. 93. Виды неуравновешенности маховиков
В случае динамической неуравновешенности неуравновешенные массы можно привести к двум массам, лежащим в одной диаметральной плоскости. Статические моменты этих масс относительно оси вращения в случае чистой динамической неуравновешенности равны между собой (рис. 93, б).
При вращении маховика центробежные силы этих приведенных масс образуют пару, момент которой, постоянный по абсолютной величине, непрерывно меняет свое направление. Эта пара сил также действует на подшипники, вызывая их колебания. В соответствии с обозначениями на рис. 93, б момент этой пары
 (44) (44)
Как видно из приведенного, момент пары увеличивается с ростом угловой скорости и становится равным 0 при w = 0. Вследствие этого динамическую неуравновешенность можно обнаружить только при вращении детали. В чистом виде динамическая неуравновешенность маловероятна.
Одновременное наличие статической и динамической неуравновешенности создает так называемую комбинированную (смешанную) неуравновешенность. Центробежные силы неуравновешенных масс приводятся в этом случае к силе Р и паре (F1F), причем сила и пара не находятся в одной плоскости (рис. 94).

Рис. 94. Комбинированная неуравновешенность маховиков
Такая неуравновешенность чаще всего встречается на практике. Систему, состоящую из силы и пары, можно привести к двум скрещивающимся силам, расположенным в произвольных плоскостях, перпендикулярных к оси вращения тела. Разложим силу на две параллельные ей Р1 и Р2, лежащие в произвольно выбранных плоскостях.
Рис. 95. График для определения допускаемого смещения центра тяжести маховика в зависимости от угловой скорости
Разложим также каждую из сил пары на составляющие F1'F2' и F1" F2". В результате мы получим в первой из выбранных плоскостей сходящуюся систему сил P1F'1F2", а в другой плоскости — систему P2F'2F2". Заменив каждую систему сил одной равнодействующей, получим две силы R1 и R2, лежащие в тех же плоскостях. Следовательно, при комбинированной неуравновешенности все неуравновешенные массы можно заменить двумя массами m1 и m2, лежащими в произвольно выбранных плоскостях.
Смешанная неуравновешенность характерна для таких деталей, размеры которых вдоль оси вращения достаточно велики.
Для устранения неуравновешенности либо подбираются дополнительные массы (уравновешивающие грузы), либо, наоборот, снимается часть массы уравновешиваемой детали. Это устранение неуравновешенности детали называется балансировкой статической или динамической, в зависимости от того, какой вид неуравновешенности устраняется.
Современные высокоскоростные маховики обычно имеют дискообразную форму с диаметром, значительно превышающим их толщину. Из опыта уравновешивания известно, что при отношении толщины детали к ее диаметру D менее 0,2 динамической неуравновешенностью можно пренебречь и проводить только ста-тическую балансировку. Однако точность статического уравновешивания не всегда оказывается достаточной, и тогда применяется динамическое, обеспечивающее более высокую точность уравновешивания.
Центробежную силу, вызываемую неуравновешенностью, обычно определяют по выражению

где К — коэффициент, выбираемый в результате анализа условий работы; G — масса тела.
Рекомендации различных авторов по выбору коэффициента К весьма разноречивы, причем значение его колеблется от 0,01 до 0,5. Такое расхождение объясняется тем, что каждый из авторов учитывал специфические условия работы отдельных машин. При этом, чем массивнее вращающийся ротор по сравнению с машиной, тем большую точность уравновешивания необходимо обеспечить, поскольку массивный ротор воздействует не только на несущие подшипники, но и на всю машину или узел, вызывая их вибрацию.
На рис. 95 дан ориентировочный график для определения среднего допускаемого смещения центра тяжести q0 В зависимости от частоты вращения. При этом для более легких маховиков в тяжелых, грубых механизмах можно принимать верхний предел, а для массивных маховиков легковесных точных машин — нижний предел. Уточнение допуска на неуравновешенность должно производиться путем исследования машины в рабочем состоянии, измерения вибраций и сопоставления их с допускаемыми по ГОСТу. Например, согласно ГОСТ 5908—51 установлены следующие предельные нормы амплитуды вибраций в зависимости от частоты вращения: 1500 об/мин — 60 мкм, 3000 об/мин — 40 мкм, 5000 об/мин — 30 мкм.
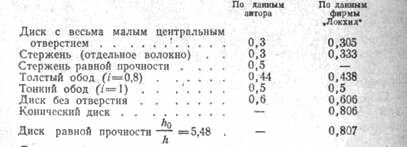
ТАБЛИЦА 6
В табл. 6 приведены значения точности уравновешивания на приспособлениях для статического балансирования.
Ниже даны значения точности уравновешивания (в мкм) на приспособлениях для динамического балансирования:
Станки на качающейся опоре..................... ..20—30
Опоры со спиральными пружинами............. ...7—12
Свободно лежащая балка.............................3—10
Маятниковая подвеска.............................. ...3—10
Станки рамной конструкции.................... . ....3—10
Стробоскопические устройства и станки..... ...3—6
Маятниковые станки....................................3—6
Маятниковая опора................................ .....2—4
Электронные станки....................................0,4—1
На чертежах в технических условиях допуск на неуравновешенность обычно определяется моментом M = q0G.
Исходя из этих данных, можно подобрать приспособление для балансировки маховика.
Анализ приспособлений для статической балансировки показывает следующее. Параллельные стенды наряду с простотой имеют достаточно высокую точность. Им следует отдавать предпочтение в тех случаях, когда обе шейки вала имеют одинаковые диаметры и выполнены достаточно точно. Роликовые приспособления можно рекомендовать для тяжелых деталей. Их точность в данном случае такая же, как и у параллельных стендов, но они более удобны, поскольку не требуют тщательной выверки и легко переносятся к месту работы. Преимуществами дисковых приспособлений являются большая точность уравновешивания, удобство применения, простота конструкции. Балансировочные весы — наиболее точные приспособления. Агрегатированные со станками для корректирования дебаланса они весьма производительны и могут использоваться в крупносерийном производстве.
Анализ станков для динамической балансировки свидетельствует, что их точность в основном не намного превосходит точность совершенных статических устройств. При этом они сложнее последних и обслуживание их затруднительно. Следовательно, если позволяется допускаемая точность балансирования, целесообразнее применять статические устройства. Исключение составляют случаи, когда обязательно требуется динамическая балансировка:

Рис. 96. Области применение статической балансировки
1) большая толщина маховика вызывает динамическую неуравновешенность; на графике (рис. 96) приведены прямые, ограничивающие область применения статического балансирования в зависимости от отношения b/D — и частоты вращения детали n; верхний и нижний пределы определяют аналогично рис. 95; маховики с высоким отношением b/D — в основном низкоскоростные и вращаются в воздушной среде;
2) требуется высокая точность балансировки; в этом случае целесообразнее всего использовать наиболее совершенные устройства для динамической балансировки, так как точность остальных близка к точности статических устройств;
3) балансировку нужно осуществлять на самой машине; такая необходимость часто возникает в результате износа ротора, замены отдельных его элементов при ремонте, остаточных деформаций и других причин; в таких случаях динамическую балансировку следует проводить с помощью особых приборов.
Ниже рассмотрены основные устройства для статической и динамической балансировки применительно к маховикам инерционных аккумуляторов.
|
|||||||||||||||||||||||||||||||||||||||